-
![液力耦合器原理油路流程知识介绍]()
液力耦合器原理油路流程知识介绍
QGF-E系列调速型液力耦合器主要由泵轮、涡轮、勺管室等组成,如下图所示。当主动轴带动泵轮旋转时,在泵轮内叶片及腔的共同作用下,工作油将获得能量并在惯性离心力的作用下,被送到泵轮的外圆周侧,形成高速油流,泵轮外圆周侧的高速油流又以径向相对速度与泵轮出口的圆周速度组成合速度,冲入涡轮的进口径向流道,并沿着涡轮的径向流道通过油流动量矩的变化而推动涡轮旋转,油流至涡轮出口处又以其径向相对速度与涡轮出口处的圆周速度组成合速度,流入泵轮的径向流道,并在泵轮中重新获得能量。如此周而复始的重复,形成工作油在泵轮和涡轮中的循环流动圆。由此可见,泵轮把输入的机械功转换为油的动能,而涡轮则把油的动能转换成为输出的机械功,从而实现动力的传递。
2022-04-22 科威设备
-
![QGF-E系列液力耦合器调节原理知识介绍]()
QGF-E系列液力耦合器调节原理知识介绍
电厂中使用的主要有电动给水泵和汽动给水泵。电动给水泵是通过厂用电带动电机转动,从而带动给水泵的转动将给水送到锅炉侧。汽动给水泵是由汽轮机抽汽驱动小汽轮机从而驱动给水泵。一般电厂内安装2台100%负荷的电动给水泵(一运一备)或者2台50%的汽动给水泵(运行)和1台30%电动给水泵(备用),以此满足电厂负荷需求。
2022-04-22 科威设备
-
![空冷岛减速机润滑压力差异调节维修知识]()
空冷岛减速机润滑压力差异调节维修知识
空冷减速机正常运行中,尤其是低赫兹启动,调向启动,大修后首次启动,等等情况下,极易发生压力报警,引发停机或根本无法起机现象。使用方若遇此情况,可以先检查油位,确认是否异常。检查线路,确认是否异常。
2022-04-19 KWZK
-
![RSTT-M1质量流量计怎么正确安装?]()
-
![调节阀阀门动作波动故障维修知识]()
-
![氩中微量氮分析仪故障维修]()
氩中微量氮分析仪故障维修
工作原理 Ar 中微量N2 分析仪用于测量高纯氩气中0~100ppm 的杂质氮.该设备用于高纯气体,不许杂质(如O2、CH4、H2、CO、H2O 等)进入.若有杂质进入,虽不会损坏电离池,但会临时削弱仪表的精确度和稳定性.这时需通入纯净气体,仪表会恢复正常且通常不用再校验. 氩气在背压为大气压的状态下流经石英电离池,该池内充满高频,高强度的电磁场.K2001 采用分光原理,通过频率,强度,校验以及耦合技术和调焦电极来保持等离子区的稳定.电光感应等离子区,等离子区收集充电粒,等离子区由氩气流组成.氩气一旦被电离,将会发出许多条光谱.电子或离子因碰撞产生激发态,气体原子或分子在电场中被电子和离子的动能加速而产生了发光现象.通过滤光片的光被光电二极管检测,并形成电流信号,此电流与氩中氮的含量成比例.光电二极管产生的电流进入一个带低通电流开关的收集器,然后进入有精密浮点程序的前置放大器,最后进入模拟-数字转换器.微处理读取这些数字信号,并通过计算把它换成ppm 数值.微处理器板再把此ppm 值变成模拟的4-20mA 隔离输出,以便传输至远程的PLC,计算机或记录仪. 微处理器还处理用户通过仪表键盘输入的功能键和有效数据.这些数据显示在4×40 字符的显示器上.微处理器还控制流量的PID 调节.
2022-03-29 科威
-
![阀门不动作DCS输入/输出故障及阀门定位器故障维修处理]()
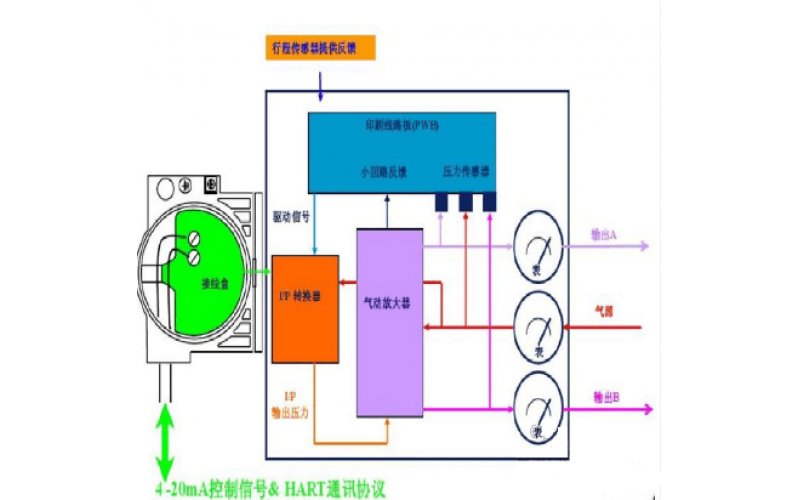
阀门不动作DCS输入/输出故障及阀门定位器故障维修处理
工作原理:从控制系统过来的输入信号(4-20mADC)经过信号线接到接线盒。电子模块处理器读取输入控制信号和阀位反馈信号,经过数字运算处理并转换成模拟量的控制驱动信号给I/P电器转换器,I/P将电信号转为气信号并由气动放大器功率放大,提供两路气动输出(不同的阀位设定可以看到输出A/B的风压表指示的变化,当输入12mADC时,可以看到A/B两个风压表指示差不多。单作用的则只有一路气动输出。)来推动阀门动作。阀门定位器的气压输出阀门控制阀门开关,当阀杆位置变化相应的磁条位置也会发生变化,霍尔传感器检测出阀位变,信号送给电子模块。直到阀位输入控制信号相一致的正确阀位上,偏差很小时,I/P电气转换器信号随之稳定,气动放大器输出气压随之稳定,一个定位控制过程结束。
2022-03-28 科威
-
![调节阀给信号不动作的问题处理]()
调节阀给信号不动作的问题处理
气动活塞式执行机构又称为气缸式执行机构,它的活塞随气缸两侧的压差而移动,允许操作压力可达700千帕,输出推力大,适合高静压,高压差,要求快速动作的场合。 气动活塞式执行机构分有弹簧式和无弹簧式两种,有弹簧式又称为单气缸执行机构,在气缸一侧输入可变信号,推动推杆做活塞运动。在气缸的另一侧装有一个弹簧,活塞运动时弹簧压缩产生相反力,当信号压力与弹簧力平衡时,推杆停止运动,此时阀门处于一个相对的开度。 无弹簧式称为双气缸执行机构,它的活塞随气缸两侧的压差而移动,行程一般为25~100毫米,气缸两侧可以输入一个固定信号,一个变动信号或者各输入一个变动信号。它的输出特性有比例式和两位式两种,比例式即输入信号压力与推杆的行程成比例关系,这时它必须带有阀门定位器。两位式是根据输入活塞的一侧或两侧压操作压力的大小使活塞从高压侧被推向低压侧,两位式执行机构控制阀门的开关动作。 此次故障阀门为双气缸式执行机构,使用阀门定位器为FISHER DVC6200,图2中的蓝色箭头为原理图中对应的P1,即气关,红色箭头对应P2的气开。
2022-03-24 科威